This is project is done as a research and development project for a Client based in Singapore with contract to transfer intellectual property at end of the project. The project is meant to automate a manual Steering wheel system so as to integrate with a automated self driving Bus (Autonomous Vehicles) being developed in Singapore.
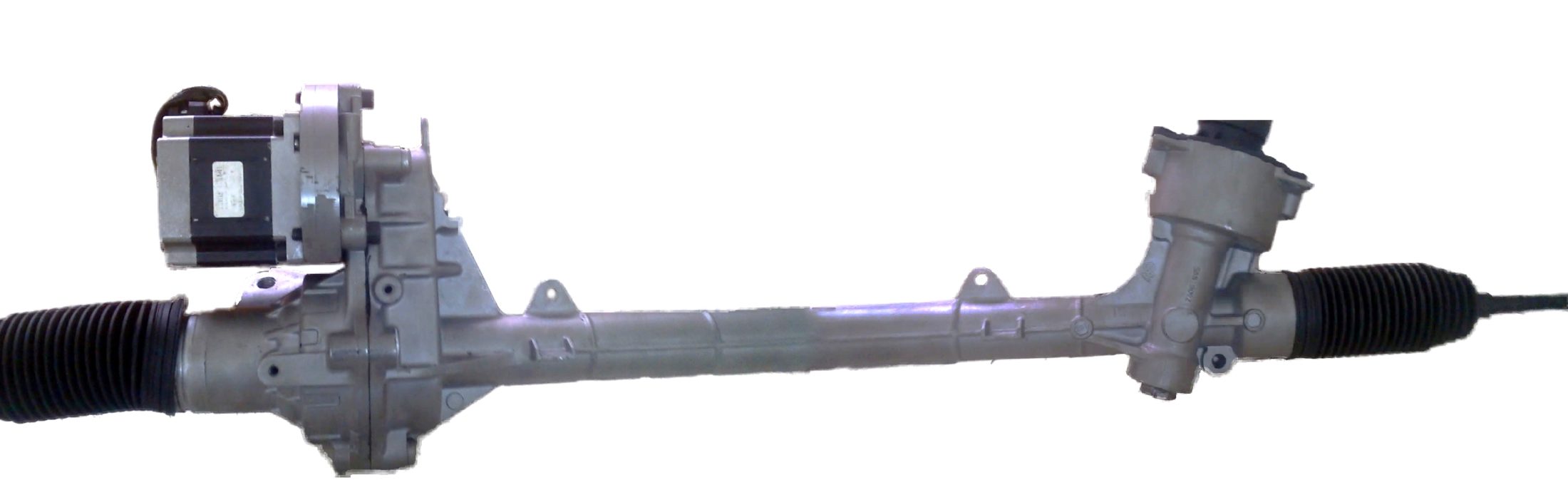
We replaced the existing Power steering system in the Steering wheel drive with a different motor with a ingenuously developed controller which is capable of accepting angle commands from the ECU/autopilot of the vehicle and would then drive the steering system to the commanded angle. This system had custom developed protocol for communication and a very precise PID control using a contact less Automotive grade angle sensors for accurate wheel angle measurement and feedback.
This project took 4 months from start of the activity till final testing and delivery of the system along with IP to the client.